作者: 中国无人机网
发布时间: 2024-01-29
文字统计:3805
本系列文章严禁转载,我本人保留所有权益哦
本文中的CC指ContextCapture
本文中图片均来源于网络,侵删
数据检查
其实数据检查只能做一些粗浅的检查,如果做比较精密的检查,需要计算的内容比较多,时间会比较长,也有些公司做一些理论的计算,比如说脚印图什么的,乍一看好像很有道理,实际上如果脚印图没有地面模型参与,就只是个纯理论计算,只要拍照点没有问题,就不会出现重叠度问题。
一般外业能检查出来的问题有:
实际上,如果你对测区不太了解,在外业甚至不好判断采集的数据是否覆盖了想要测量的目标区域。
经过整理的外业数据应该分门别类进行统一存放,归档保存。什么叫整理过的外业数据呢?大之就是POS点数量与照片数量保持一致,删除无效照片,保存的外业工作记录等等。外业记录可以理解成采集当天的天气、风力、作业员、采集方法等等等信息,信息记录的越详细,后期能够回溯的东西就越多,一句话总结就是:让没有参加实际外业工作的人能够完全掌握外业信息。而且我认为,外业原始数据(整理过的)应该作为成果数据的一部分,交给客户。
三 内业处理
1 作业流程
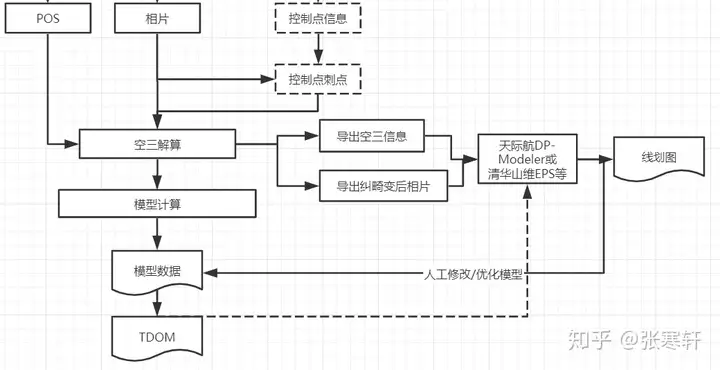
大体流程见上图
数据准备
在开始所有工作之前,要准备航片数据,POS数据,如果有地面像控点,还需要整理像控点坐标表。
这一步根据所使用的飞机不同,准备数据时间长短也不同。比如,大疆无人机会把坐标数据记录到照片的EXIF信息中,CC和PIX4D后处理软件可以自动读取,如果没有地面控制点的话,数据基本不需要整理;有些无人机可能会产生一些多余的POS信息,在整理数据时要注意剔除。
总之,后处理软件是根据POS文件和照片一一对应的文件名来确定曝光点位置的。只要把POS文件里想用的点坐标名称改为照片名称即可,如果有些POS点不想使用,不剔除,不给对应的照片名称或让软件对应不上,效果也是一样的。归档后的文件应该消除歧义,照片与POS点一一对应;或者在说明文件中说明对应关系等。
如果在作业前,在地面上试拍了几张照片,也可以不剔除,将POS文件中对应的坐标删除,如果只有少量的一两张照片,可以完全忽略,放心,后处理软件没有能力处理,当然软件最终可能会提示你有几张照片无法加入到空三,没关系,要的就是这个效果。
另外要注意的是,所有你加入到一个后处理软件项目里的照片必须有重叠度,不能添加两块分离的测区进行同时处理,软件只能处理出来一块区域。不相邻的两个区域,必须使用两个项目进行分别处理。
相控点刺点
如果有相控点,需要在不同的航片中刺出同一个点在相片中的位置,并对应坐标。每个相控点至少要刺两张照片。
如果没有空三信息,刺点是一件非常麻烦的事情,因为没有对应的数学关系,所有相片需要人工挑选,想想一下在几千张照片中挑选相控点照片的情景。这时候,我们可以先跑个小空三,将照片“抽稀”使航片有一定的相关关系,虽然不是很准,但可以根据你选择的相控点坐标信息自动筛选可能会出现该相控点的照片,方便刺点。
刺点时,要将照片尽量放大,刺在颜色分明的分界线处。
空三计算
空三的全称是空中三角形计算,也有叫空三加密的,都是一个意思。所谓三角形计算,其实是传统测量中的一种说法,在全站仪和GPS技术流行前,制作控制网主要使用三角网或三角索方法,所以一般把控制测量也称为三角测量。所以空中三角形计算的本意其实是空中控制测量。通俗一点的说,就是根据重叠度、POS、地面相控点恢复、反算、平差,最终目的是为了得到航片在空中的位置和姿态。
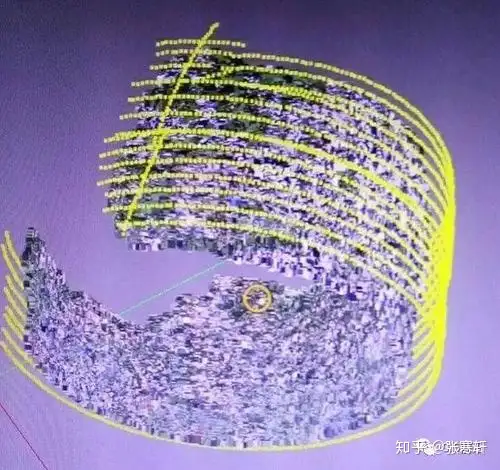
空三可以说是最重要的后处理步骤。因为航片的数学关系直接影响最终成果,一旦空三跑过了,建模一般就没有问题了,一般说数据问题比较大,就指的是空三有问题,空三干脆跑不过,或者误差很大,分层,丢航带,空三卷曲等等。
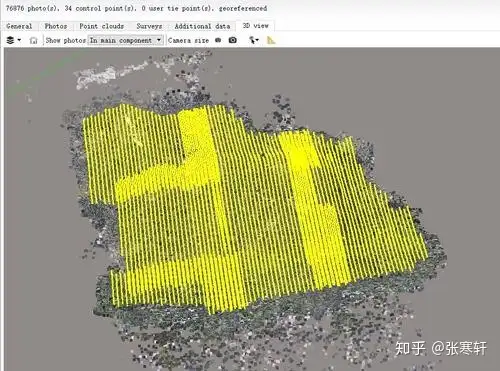
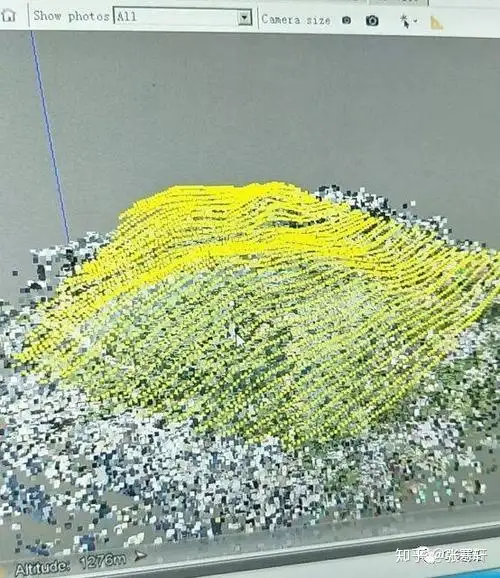
可以看到,不仅照片和照片之间要求有重叠度,不同架次之间的数据也需要有重叠。
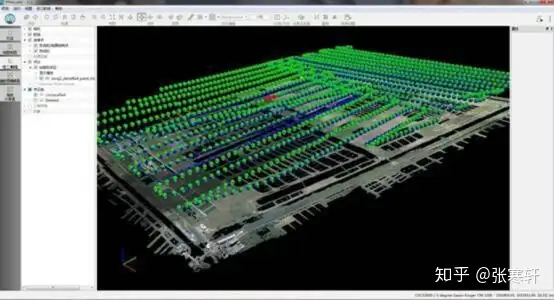
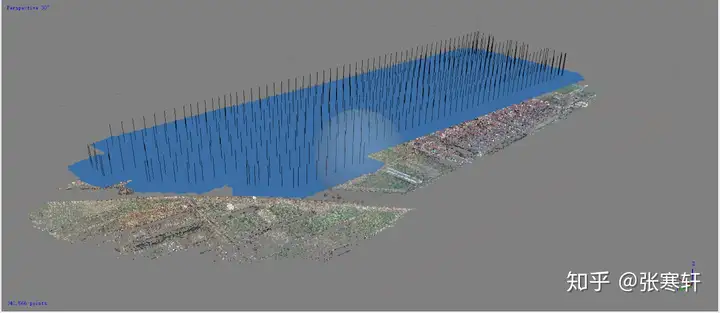
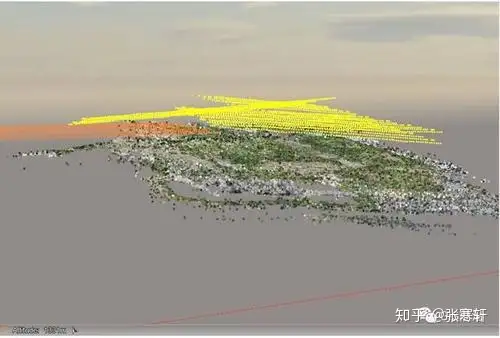
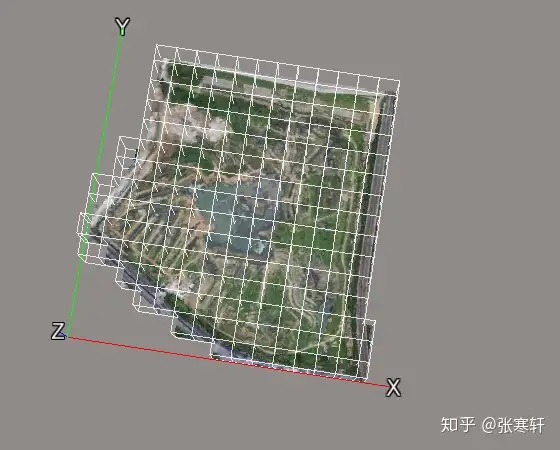
模型计算
空三结果只能看到稀疏的“照片拆成的点云”,所以只能看个大概,如果没有错层、起翘等等细小的异常结果,就可以执行下一步生成模型了。使用CC建模时,如果测区比较大,强烈建议大家分块进行建模。
至于软件如何操作,各大网站、公众号教程已经非常多了,这里只带大家理解流程,具体的操作步骤就不赘述了。
如果你在看其他材料的时候,发现空三计算流程很多很多,比如什么自动生成特征点、构建TIN网、构建mesh面什么的,不用管它,那只是软件中自动的流程,对于操作者而言,只有空三和建模两个可见操作。
PC配置
把照片直接生成模型这件事,对计算的计算性能要求比较高,这个过程不仅仅是把图片拼接起来那么简单,如果仅仅是拼接起来,速度可以很快,但精度就下降了,所以那些说自己可以实时成图的,全部都是顶多能保证相对精度。那这个精度够不够用,不同应用有不同标准,对于测绘标准来说,实时成图精度肯定不够用。
CC需要什么样的配置呢?
话说回来,其实什么配置都可以做这个工作,只是时间长短的问题,空三处理2小时出成果和2天出成果的效率影响的不仅仅是这一次工作,如果你的空三有问题呢?在尝试解决空三问题的时候,能够快速出成果的机器所节省的时间肯定不是46小时。
你就往主流游戏PC上配,肯定没毛病。有钱的土豪,你就往骨灰级游戏PC上配,肯定没毛病。到什么时候呢,采购一台主机的钱能配两台主流游戏PC配置时,这时候,配两台,不要一台高性能。
来点干的吧
集群设置要点
我不是要讲解集群如何设置
好了以上是这次的内容了,下一讲,将介绍常用的后处理软件,根据所需要的成果使用最便捷的工具,嗯
版权声明:
1. 本站内容除注明转载外,均为原创,本站保留版权,转载请注明: 转自 “中国无人机网(uavcn.net)” 。
2. 本站转载内容,均来自互联网,并注明出处或作者,转载内容及观点仅代表网站或作者本人,本站仅提供信息存储服务,不拥有版权,不承担相关法律责任。如发现涉嫌抄袭、侵权、违法违规内容,请联系本站,一经查实,本站将立即删除。
热点排行
更多哈苏无人机科技申请面向城市物流的无人机精准投送控制方法及系统专利
2026-01-20大疆全新1度电户外电源DJI Power1000 V2发布 解锁多场景无忧出行体验
2025-07-08五年扛鼎之作攀登旗舰新高峰 DJI 大疆全球发布行业级飞行平台 Matrice 400
2025-07-08大疆旗舰级运载无人机 DJI FC100 发布:低空运输集大成者
2025-07-08大疆正式发布 DJI Mavic 4 Pro:全新三摄旗舰,天地为你所动
2025-07-08大疆农业发布T100、T70系列农业无人机:载重新突破,吊运更方便
2024-11-27