作者: 中国无人机网
发布时间: 2024-01-29
文字统计:4733
本系列文章严禁转载,我本人保留所有权益哦
4 无人机组成
一般的民用无人机由以下几大部分组成:飞控、机体、动力组成、动力来源、载荷、地面站。多个子系统组成了一个庞大的系统,任何一个子系统的功能都不能由其他系统代替。(怎么好像是废话……)
飞控
飞控是无人机的大脑,是控制无人机的单元,实现对无人机所有子系统的协调配合。像是航线规划的飞行路径,飞机机体参数,电机电调参数等等,都记录在飞控里并由飞控控制。我们普通使用者其实不必关心飞控具体是如何控制的,只需关注能实现什么样的功能即可,你可以把飞控当成一台小电脑,控制整个系统运行。
机体
无人机按机体机型划分的话,大致可以分为固定翼无人机、多旋翼无人机、单旋翼无人机(直升机)、垂直起降固定翼无人机(复合翼无人机)。如果细分的话,还能继续划分,比如固定翼无人机有飞翼式,多旋翼无人机有3轴、4轴、6轴、8轴,还有共轴反桨等等。
2010年,当时的国家测绘局向省级测绘院下发了固定翼无人机,表明了国家局的态度,当时的无人机技术还是比较落后的,还没有特别先进的自动化技术,手动控制,需要滑跑起飞,动力也是靠燃油的。

因为固定翼飞机起飞降落都需要一条跑道,对场地要求比较苛刻。后来又衍生出弹射架式:

弹射架的问题是,弹射架比较重,体积也不小,不容易携带。另外使用弹射起飞+伞降的方式,在风天里,无人机降落时开伞后,可能会被吹的很远,然后就要花好长时间找飞机。还有一种使用弹射架起飞的泡沫飞翼无人机,使用迫降方式着落,设计理念是使用较便宜的泡沫材质,如果摔坏了,就花点小钱去换一个,飞机里的关键部件完好无损就行,但也没有大范围流行开。
所谓迫降就是直接用机身蹭地减速,当然速度角度都要控制好。

还有手抛式启动和伞降/迫降降落的,无需携带弹射架,但操作起来也都差不多,就不多解释了。
再往后ebee和垂起固定翼就出现了,ebee也是泡沫飞翼机,不过起飞方式轻松了很多,天宝的UX11也是类似的无人机。垂起固定翼的出现大大降低了对起降场的要求,像手抛式,弹射架式仍然都需要保证飞机前方有个上升航道,就是说飞机在爬高的时候需要个干净的空间,如果在建筑物多的地方还是无法起飞和降落;而垂起固定翼就没有这样的限制,垂起固定翼顾名思义,先用多旋翼模态升高到一定高度,再切换成固定翼方式,既保留了多轴无人机方便起降的特点也实现了长航时的要求,是目前比较流行的机型。

多旋翼无人机大家比较熟悉,著名的大疆公司就没有一架公开的机型不是多旋翼的,特点是操作简单,结构简单。在空中可悬停,为操作者留出反应时间。但电动续航是个问题,大疆消费级无人机多说也就飞个小半小时,工业级小一个小时吧。也有公司空载悬停时间能到2小时的,但一个这是空载,一个是悬停性能对于测绘来说,似乎不是首要考虑的指标。

最后是单旋翼无人机,因为其结构复杂,操作复杂,维护困难,受众比较小,但是其载重量是比较大的,单旋翼的下压风场也正好适用于农药喷洒,无距科技这方面做得不错,复杂的操作都交给无人机飞控完成了,不过似乎没听说哪家公司用电动无人机直升机来做测绘的事。

动力组成
无人机的动力一般叫动力套装,由桨叶、电机、电调组成。这块内容有点超纲,已知的是无人机是个系统工程,不能单独更换桨叶或电机达到某种效果。
动力来源
分为油动和电动,目前测绘应用油动基本上已经消失了,油动安全隐患比较大,一旦发生炸机的话,后果可能会比较严重。
目前电动垂起固定翼的最大续航时间可达3.5小时,这时候估计很多人想问,那3.5小时能飞多大面积?对不起,答不上来,不知道你用什么样的相机和镜头,也不知道你要拍多大分辨率/比例尺的图,工作效率与参数设置有很达关系,不过,也不用着急,后面讲外业航线规划的时候,会讲到的。
载荷
载荷其实指的是与飞行任务本身无关的,与业务需求相关的机载设备。测绘行业也就是单相机、倾斜相机、多光谱相机、机载lidar了,其实还可以带什么气体分析仪、光电吊舱、测高仪等等,只要你敢想。
一套无人机的价值大多也集中在载荷设备上,无人机的成本其实并不高。无人机就陷入了一个奇怪的圈里,本身业务不能由无人机本身完成,是由载荷完成的;无人机平台的稳定性却又决定了载荷设备的生死存亡……
言归正传,测绘领域常使用的单相机:索尼5100,别问,问就是便宜。也有用更高画质的A7R的,A7 4的,甚至佳能5D、飞思一亿像素。其实,根据实际情况够用就好,在价格和工作效率、分辨率之间做个权衡,别管开奥迪还是开奥拓谁也开不上月球去。
倾斜相机,见仁见智,市场上也都是用单相机拼出来的,目前来看5100拆机版5拼倾斜相机的体积能做的很小很小,像烟灰缸那么大,哦,是大一点的烟灰缸。A7R的就要更大一些,这也得根据飞机的载重能力、机身空间去做判断,如果是使用多旋翼的话,那就看带上载荷之后载重和续航时间能不能满足飞机和你的要求吧。

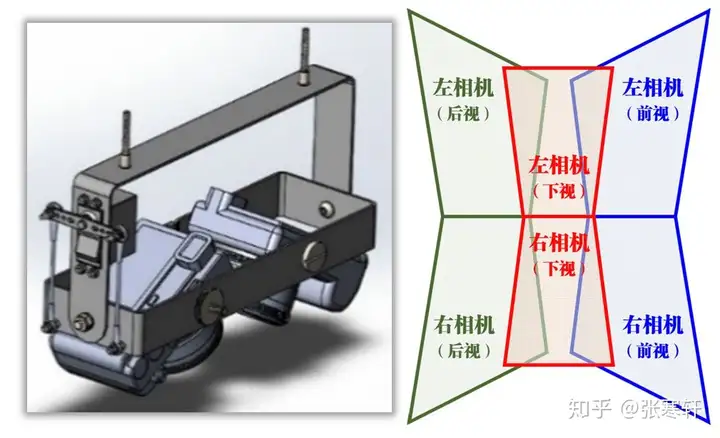
这里要说一下摆动式倾斜相机,摆动式相机是由两个相机前后摆动去捕捉前、中、后三组,两个相机加起来共6张照片,采集相片。从原理和结构上来说,摆动式更复杂,摆动频率跟飞机的飞行速度相关,所以要根据飞机速度实时调整摆动频率,所以整套系统也更复杂。还有那种旋转式的,大同小异吧,本人不是特看好这种结构,增加了结构复杂度,也就增加了故障概率,不过倒是能剩下多个相机的钱。
不论使用什么样的相机,相机的镜头一定要选择定焦式,变焦相机的每一个焦段镜头畸变都是不同的,如果在拍摄时发生焦段变化,会对后处理软件造成困扰。另外变焦和对焦的概念不同,通俗的说,变焦是改变取景范围大小;对焦是指将焦距对准离相机距离不同物体以保证对焦位置成实像。航测时,一般使用对焦到无穷远,即15米外景物均成实像。
在本教程的结尾有附加,详细介绍摄影的概念。
在消费相机里,成实像范围大这个概念叫大景深,即成实像的范围大。大景深的技巧是使用小光圈加短焦距。过小的光圈会引起曝光时间的增加才能保证照片正常曝光,无人机飞行速度快,长曝光时间可能会导致照片模糊,如果相机使用快门优先或者手动曝光模式,实际拍出来的照片可能会偏暗,或有拖影;如果使用光圈优先模式,会导致每个相机拍照的时间不同,最终导致多个相机拍照不同步。所以实际航测时,要根据以往的拍摄经验调节,选择好天气作业,一般设置ISO感光度自动调节,但要给自动调节设置一个范围,因为过高的感光度会增加照片的噪点,ISO不应大于1250,一般拍摄普通照片(例如人像)时最高设置为800。
光圈、快门、ISO三者配合确定了照片的曝光量,光圈即使用小孔成像时的孔径大小,快门即曝光时刻快门开启的时间,ISO是底片(现在都是感光元件了)的感光度。光圈优先指的是使用者设置光圈值,相机程序自动控制快门值;快门优先指的是使用者设置快门值,相机程序自动控制光圈值,两个方式都可以正确曝光。ISO需要单独设置。更深的知识欢迎大家找一本摄影的书看看,这部分内容应该哪本书上都有讲,如果推荐的话——《美国纽约摄影学院摄影教材》。
还有些相机有内置的防抖功能,一般在做航测时要把防抖功能关掉。有些相机的防抖功能是通过感光原件的微动实现的,无法关闭,这样的相机不能用来做航测。
lidar设备我没有实际用过机载的,所以不多评论吧,目前因为国产的产品加入,价格和重量都在走低,但是这玩意还是比相机(组)贵得多。lidar设备因为其比较高的工作频率,需要高频率的定位定姿设备配合使用。
定位设备
定位设备就是GNSS设备,北斗也有可能会被用到,看厂家用什么样的芯片了。定位方式分为单点定位,和差分定位。一般的说,单点定位精度低,差分定位精度高。单点定位精度如果使用新版高端的芯片可高至2.5米,差分的话可高至1厘米。还有单点高精度定位PPP,不过这玩意现在好像还没人用在无人机上,现在的应用好像都是在船上或者离岸很远的岛上。
差分定位分以下几种,后差分(PPK),实时差分(RTK)。后差分一般都使用单基站方式;实时差分可以使用单基站架站式、千寻位置、CORS网等等。
单基站差分,在地面上设置一个基准站(简称基站),基站以自己的建站(输入的已知坐标或经过平滑的坐标)后的差分信息,用网络或电台实时发送出去。流动站(可以装在无人机上,也可以在地面上使用,就像传统的GPS-RTK)收到基站发出的差分信息,结合流动站自己采集的GPS信息即可计算出高精度的相对定位信息。
单基站定位的精度是基于基站来说的,也就是说,RTK测量精度1厘米是相对于基站来说的。如果基站是使用平滑后的坐标得到,则该坐标系并不是测绘部门用的绝对坐标系,若要使用测绘部门的绝对坐标系,则需要在外业架站时假设在已知点,建站时输入已知点坐标。一个单基站可给多个流动站同时使用。
实际上差分定位方法测量的是基线,就是说流动站和基站之间测得一个方向向量,根据基站的坐标和方向向量可以计算出流动站的坐标。
千寻位置和CORS类似于在一个较大范围内建立了很多个基站,因为基站和流动站需要有共同观测的卫星,所以当基站和流动站距离过远时,就需要更换附近的基站了。架设基站和在流动站切换基站都是一件比较麻烦的事情,所以在大范围区域内建立长时间观测并发送差分信号的基站使用起来比较方便。测绘系统原本使用的是CORS,即“连续运行参考站”,每个省都有一个网,使用CORS需要到测绘主管部门申请,申请时需要提供测绘资质。使用CORS在跨省的时候就比较麻烦了,如果在三省跨界的时候……;千寻定位是阿里巴巴和中兵联合开发的,全国一个账户,服务范围可以在官网查询,几乎覆盖整个中国。要注意的是,从理论上说,千寻位置和CORS使用的不会是一个坐标基准,系统不要混用。
PPK与RTK的区别是,PPK无需基站和无人机实时通讯,二者将数据记录下来,回到内业用软件做差分,虽然不需要实时通讯,但基站和无人机流动站记录的数据需要在同一时间段内,只有在相同时间内记录的数据才能被解算,没有相同观测时间和共用卫星数不够的测段只能是单点定位;RTK需要基站与无人机有实时通讯,地面测量时使用的RTK一般都会使用2G/3G/4G网络(差分电台很少使用了)进行实时传输,但无人机在天上,尤其是测绘无人机可能相对航高两三百米,早就没有移动网络信号了,这时候就需要使用电台与无人机通讯了,通讯距离有限,并且如果遇到飞机转个弯调头,差分信号中断的话,这时候无人机就是单点定位精度,效果好的话10米以内。
地面站
地面站是用户用来监控飞机飞行状态、进行航线规划、上传下载数据的软硬件设备。像大疆的地面站只有软件,硬件自己配,一个手机配合遥控器全搞定。工业上也有使用箱体地面站的,会有一些独特的功能。
有的工业级地面站可能还会搭配巨大的无线电发射接收设备,满足客户对远距离无人机控制或图像传输的需求。
说些题外话
现在绝大部分无人机企业在写自己飞机参数的时候,会把最好的参数拼凑起来,什么意思呢?比如飞行时间2.5小时,载重2公斤,控制距离5公里。其实是空载的时候飞机能飞2.5小时,如果满载中可能只能飞1个小时也不一定;配合2公斤的载荷能起飞,能飞多长时间就不一定了;在地面站与无人机无线电通视的情况下,能控制5公里,在繁杂的市区可能不到一公里就没信号了。
这些参数写到一张表里,让人感觉是同时能达到的指标,其实可能并非如此。
好了,终于把前言写完了。因为测绘需要挺多环环相扣的基础知识,如果统一拿出来讲呢,篇幅有点长,估计也就看不下去了,所以就把这些东西进行了穿插,但素目前并没有讲完,碰到了再讲吧。
下一节,将讲述外业部分。
版权声明:
1. 本站内容除注明转载外,均为原创,本站保留版权,转载请注明: 转自 “中国无人机网(uavcn.net)” 。
2. 本站转载内容,均来自互联网,并注明出处或作者,转载内容及观点仅代表网站或作者本人,本站仅提供信息存储服务,不拥有版权,不承担相关法律责任。如发现涉嫌抄袭、侵权、违法违规内容,请联系本站,一经查实,本站将立即删除。
热点排行
更多哈苏无人机科技申请面向城市物流的无人机精准投送控制方法及系统专利
2026-01-20大疆全新1度电户外电源DJI Power1000 V2发布 解锁多场景无忧出行体验
2025-07-08五年扛鼎之作攀登旗舰新高峰 DJI 大疆全球发布行业级飞行平台 Matrice 400
2025-07-08大疆旗舰级运载无人机 DJI FC100 发布:低空运输集大成者
2025-07-08大疆正式发布 DJI Mavic 4 Pro:全新三摄旗舰,天地为你所动
2025-07-08大疆农业发布T100、T70系列农业无人机:载重新突破,吊运更方便
2024-11-27